PARTES:
- 4x motores brushless (sin escobillas)
- 4x ESC (para poder hacer girar este tipo de motores)
- 4x helices
- Una bateria, las mas usadas son del tipo LiPo
- Una placa controladora. Es donde escribiremos el codigo del dron.
- Un sensor (giroscopio-acelerometro)
- Un fuselaje donde montar el resto
- Una emisora RC + un receptor RC
Mas tarde se podria añadir un sistema GPS y/o telemetría.
FUNCIONAMIENTO
El dron se eleva y se estabiliza gracias a la fuerza de sus cuatro motores.
Lo más destacado es que dos motores giran en sentido de las agujas del reloj y los otros dos en el contrario. Hay que colocarlos dos a dos, es decir, los que giran en el mismo opuestos.
Lo primero y más importante es entender como sube y baja el aparato. En el siguiente diagrama se muestra como hay que variar la potencia de los motores para que suba o baje. En la figura a) el dron subiría, y en la b) bajaría. Para hacer permanecer al dron estable hay que encontrar la potencia que deben desarrollar los motores para que su fuerza de empuje sea igual al peso de la aeronave. Notar que en el diagrama se muestra también el sentido de giro de los motores.
 Que un dron suba y baje no es suficiente, necistamos que se mueva en los ejes x e y. En este momento se nos plantea un dilema. Un dron puede navegar en forma de + o de x. A continuación explico ambos desplazamientos.
Que un dron suba y baje no es suficiente, necistamos que se mueva en los ejes x e y. En este momento se nos plantea un dilema. Un dron puede navegar en forma de + o de x. A continuación explico ambos desplazamientos.
Desplazamiento en +
Aquí muestro el diagrama de funcionamiento. En la figura a) iría hacia atrás, en la b) hacia delante, en la c) hacia la izquierda y en la d) hacia la derecha. Recordemos que no se trata de giros sino de movimientos en el plano.
 Desplazamiento en x
Desplazamiento en x
A continuación muestro el funcionamiento en x. En la poscion a) avanzaría, en la b) retrocedería, en la c) iria hacía la derecha, y en la d) hacia la izquierda. Como en el caso anterior no se tratan de giros.
Cabe mencionar que si queremos un avance más brusco los motores que están en velocidad media (blanco) se pueden poner en low speed (verde).



Lo primero y más importante es entender como sube y baja el aparato. En el siguiente diagrama se muestra como hay que variar la potencia de los motores para que suba o baje. En la figura a) el dron subiría, y en la b) bajaría. Para hacer permanecer al dron estable hay que encontrar la potencia que deben desarrollar los motores para que su fuerza de empuje sea igual al peso de la aeronave. Notar que en el diagrama se muestra también el sentido de giro de los motores.

Desplazamiento en +
Aquí muestro el diagrama de funcionamiento. En la figura a) iría hacia atrás, en la b) hacia delante, en la c) hacia la izquierda y en la d) hacia la derecha. Recordemos que no se trata de giros sino de movimientos en el plano.

A continuación muestro el funcionamiento en x. En la poscion a) avanzaría, en la b) retrocedería, en la c) iria hacía la derecha, y en la d) hacia la izquierda. Como en el caso anterior no se tratan de giros.
Cabe mencionar que si queremos un avance más brusco los motores que están en velocidad media (blanco) se pueden poner en low speed (verde).

Una vez sabemos movernos en el plano toca aprender como giran. Cualquier aeronave, desde un helicóptero de juguete, pasando por un Boeing 747, hasta un caza militar, todos tienen tres giros básicos mostrados en la siguiente figura.
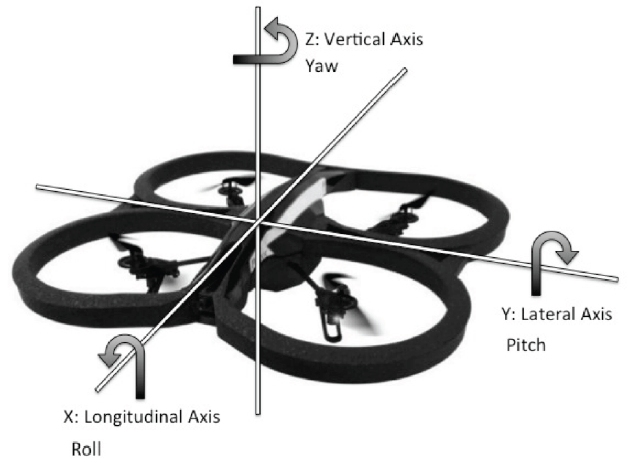
El giro que nos interesa general es el yaw (z), los otros dos en el caso de un dron no son necesarios.
Giro en z - Yaw
En las dos figuras siguientes se muestra como hace un dron un yaw. En la a), giraría en sentido contrario de las agujas del reloj; y en la b), en el sentido de estás.

No hay comentarios:
Publicar un comentario